1. Конструкция магнитных энкодеров
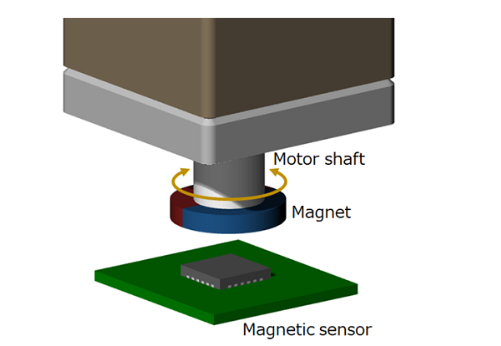
Магнитные энкодеры определяют угловое положение путем измерения изменений магнитного поля и преобразования в электрические сигналы. Базовая конфигурация включает:
- Постоянный магнит на вращающемся элементе (напр., вал двигателя)
- Магнитная сенсорная ИС на плате в зоне действия поля
При вращении магнита сенсор фиксирует изменение направления поля, определяя положение и скорость вала.
1.1 Элементы Холла
Используют эффект Холла для генерации напряжения, пропорционального магнитной индукции. Материалы:
- Высокая чувствительность: InSb (антимонид индия)
- Термостабильность: GaAs (арсенид галлия)
- Сбалансированные свойства: InAs (арсенид индия)
- Кремний (Si) для интеграции в ИС
Типы: датчики продольного/поперечного поля.
1.2 Постоянные магниты
Дисковая форма с радиальным/аксиальным намагничиванием. Выбор зависит от:
- Требуемой магнитной индукции
- Рабочей среды
- Габаритных ограничений
Типовая конструкция 2-дорожечного энкодерного диска:

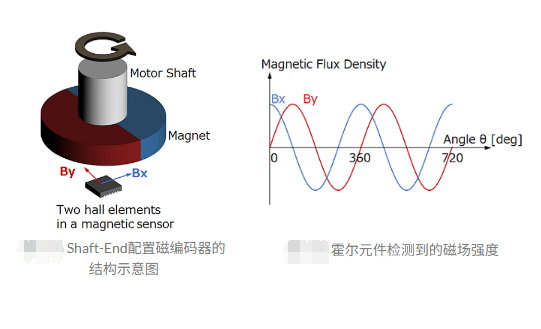
2. Принцип работы
2.1 Основы
При вращении вала элементы Холла детектируют компоненты:
- Bx (ось X)
- By (ось Y)
2.2 Преобразование угла
Поле → Эл. сигналы → АЦП → Вычисление угла arctg(By/Bx)
- Идеальные условия: фигура Лиссажу = круг (погрешность 0°)
- Допуск эксцентриситета: <±0.1°
2.3 ИС датчиков угла
Интегрируют: Магнитный сенсор + АЦП + Процессор. Применяются в компактных абсолютных энкодерах для промышленности/автосектора.
Техническая классификация магнитных энкодеров
1. По типу выходного сигнала
| Тип | Принцип | Применение | Модель-пример |
|---|---|---|---|
| Инкрементальный | Выходные импульсы A/B/Z, требует реперной точки | Лифтовые двигатели, конвейеры | Broadcom AEDR-8700 |
| Абсолютный | Прямой вывод позиции (бинарный/код Грея) | Роботы, ЧПУ | AMS AS5048A |
| Многооборотный | Зубчатый механизм записи оборотов (±4096) | Ветрогенераторы, тяжелая техника | RLS AksIM-2 |
2. По технологии сенсора
| Тип | Технические характеристики | Преимущества/Ограничения |
|---|---|---|
| Эффект Холла | Детектирует вертикальную компоненту поля, линейный выход | Низкая стоимость, стойкость к загрязнениям (Allegro A1335) |
| Магниторезистивный | Использует GMR/TMR, высокая чувствительность | Разрешение ≤0.1° (TDK TAD2141) |
| Индуктивный | Вихретоковый принцип, устойчивость к ЭМП | Для сред с сильными помехами (SICK ATM60) |
3. По механической конструкции
| Тип | Способ установки | Типовое применение |
|---|---|---|
| Втулочный | Непосредственно на вал двигателя | Серводвигатели (Maxon ENC) |
| Модульный | Отдельный PCB-модуль, внешнее магнитное кольцо | Модернизация (Renishaw RM08) |
| Полый вал | Боковое размещение магнита, экономия осевого пространства | Суставы роботов (Vishay RAIK060) |
Представительные модели ИС магнитных энкодеров
1. Международные флагманские решения
| Модель | Производитель | Разрядность | Интерфейс | Ключевые характеристики | Экстремальные условия |
|---|---|---|---|---|---|
| AS5047P | AMS | 14 бит | SPI/ABI | Компенсация динамической погрешности (±0.05°) | -40°C ~ 150°C |
| MA730 | Monolithic | 14 бит | SPI/UVW | Встроенный PGA, защита от помех | Вибрация 50g |
| TLE5012B | Infineon | 15 бит | SPC | Двухканальная избыточность (автокласс) | AEC-Q100 |
| A1335 | Allegro | 14 бит | PWM/Аналог | Внутренняя EEPROM для калибровки | Защита от ЭСР 8кВ |
Свяжитесь с нами для обсуждения ваших индивидуальных требований к магнитным энкодерам!