I. Обычный двигатель с железным ротором
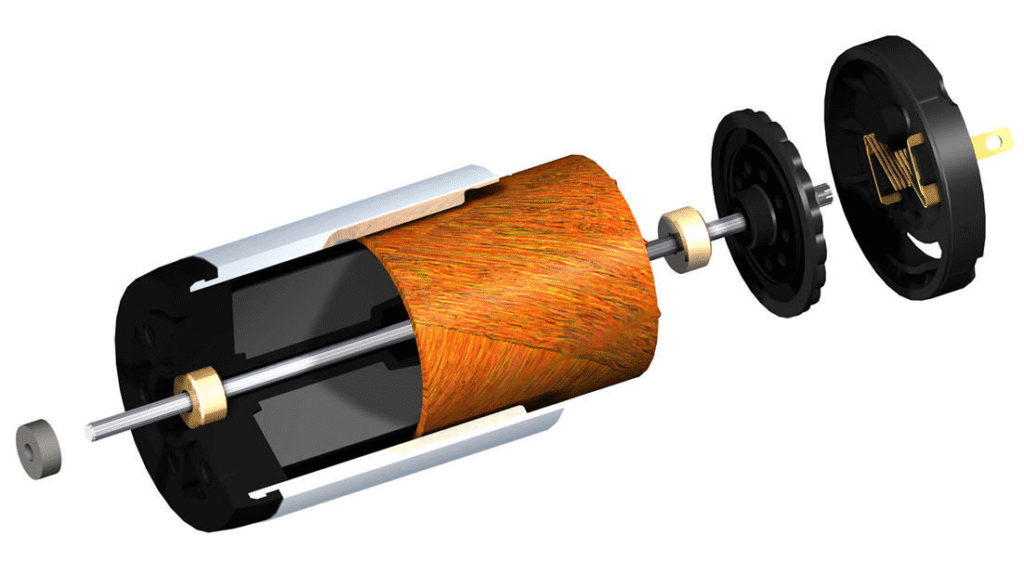
Ротор обычного двигателя постоянного тока набирается из пластин электротехнической стали, а обмотки наматываются на железный сердечник. Такой двигатель обладает большой инерционностью, большой индуктивностью и относительно медленной скоростью реакции.
1. Требования к определению положения:
- Высокая точность и разрешение: Многие применения, такие как суставы роботов и станки с ЧПУ, требуют знания абсолютного положения и точной скорости ротора для осуществления прецизионного управления движением.
- Низкоскоростные характеристики: На низких скоростях или даже при нулевой скорости необходимо обеспечивать стабильный крутящий момент, что требует от датчика возможности предоставлять качественный сигнал положения и на низких скоростях.
- Надежность: Промышленные условия требуют, чтобы датчики были прочными, долговечными и обладали высокой помехоустойчивостью.
2. Способы реализации:
Определение положения в обычных двигателях обычно осуществляется с помощью физических датчиков, устанавливаемых непосредственно на вал двигателя.
- Оптический энкодер:
- Принцип: Светодиод (LED) освещает кодный диск с точной сеткой. Свет проходит через диск или блокируется им, а затем принимается фотосенсорами, генерирующими импульсные сигналы (фазы A и B). Положение определяется подсчетом импульсов, скорость — по их частоте, а направление — по фазовому сдвигу между фазами A и B.
- Типы: Бывают инкрементальные (знают только относительное перемещение) и абсолютные (каждое положение имеет уникальный код, сохраняющийся после отключения питания).
- Преимущества: Очень высокая точность, быстрый отклик.
- Недостатки: Высокая стоимость, чувствительность к пыли и загрязнениям, относительно хрупкая конструкция.
- Магнитный энкодер:
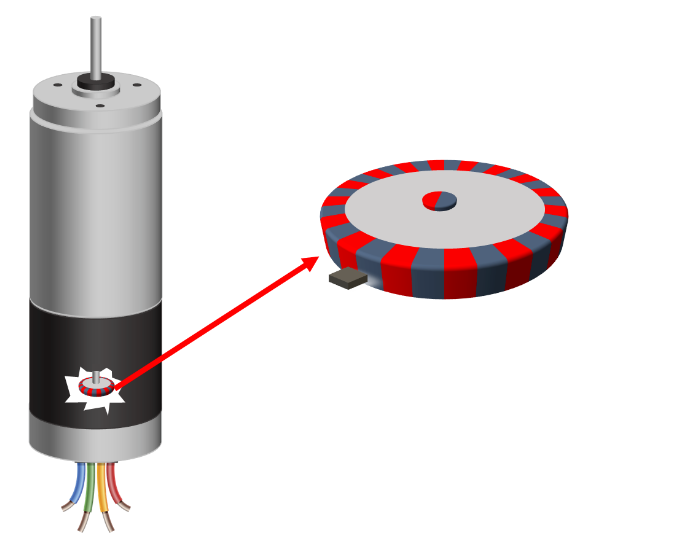
- Принцип: Магнит вращается вместе с ротором, а датчики Холла или магниторезистивные датчики определяют изменение магнитного поля, определяя thus положение.
- Преимущества: Более низкая стоимость, прочность, долговечность, высокая устойчивость к загрязнениям.
- Недостатки: Точность и разрешение обычно ниже, чем у лучших оптических энкодеров, чувствительность к внешним магнитным полям.
- Резольвер (вращающийся трансформатор):
- Принцип: Аналоговый датчик положения, измеряющий угол по принципу электромагнитной индукции. Обмотка ротора служит возбуждением, а обмотки статора выводят сигналы, синусоидально и косинусоидально связанные с углом.
- Преимущества: Чрезвычайно прочный, термостойкий, радиационно-стойкий, обладает极高的 помехоустойчивостью, идеально подходит для аэрокосмической, военной отраслей и суровых промышленных условий.
- Недостатки: Сложность системы (требуется дополнительная схема RDC для преобразования аналогового сигнала в цифровой угол), высокая стоимость.
II. Двигатель с полым ротором (Бесприводной двигатель)
В отличие от традиционных двигателей, двигатель с полым ротором не имеет традиционной конструкции ротора с железным сердечником. Вместо этого используется новая конструкция обмотки, напоминающая полый стакан. Эта уникальная конструкция обеспечивает двигателю малый вес, высокий КПД, точность, высокие скорости вращения и малые габариты, что делает возможными многие инновационные применения.
Ротор двигателя с полым ротором не имеет железного сердечника и представляет собой самонесущую обмотку “чашеобразной” структуры. Его инерционность и индуктивность чрезвычайно малы, а скорость реакции очень высока.
1. Требования к определению положения:
- Крайне низкая инерционность: Это ключевой момент. Любой физический датчик (например, энкодер) увеличивает момент инерции ротора, что напрямую нивелирует главное преимущество двигателей с полым ротором — чрезвычайно быстрый отклик и высокое ускорение.
- Обновление на сверхвысоких частотах: Из-за очень малой электрической постоянной времени частота коммутации может быть очень высокой (намного превышающей таковую у обычных двигателей), что требует equally высокой скорости обновления контура управления (включая определение положения).
- Ограничения по размеру: Многие применения, использующие двигатели с полым ротором (например, дроны, микророботы,精密 медицинские инструменты), предъявляют экстремальные требования к размеру, и в них нет места для дополнительных датчиков.
2. Способы реализации:
Therefore, двигатели с полым ротором в绝大多数 случаев используют бездатчиковое управление (sensorless control), и лишь в极少少数 случаях сверхвысоких требований к точности используются微型 датчики.
- Бездатчиковое управление (Sensorless Control):
- Принцип: Оценка положения ротора осуществляется путем обнаружения обратной ЭДС, генерируемой during работы двигателя. При вращении ротора обмотки пересекают магнитные силовые линии, генерируя обратную ЭДС (BEMF), форма сигнала которой напрямую связана с положением ротора. Путем измерения напряжения в незадействованной фазе (не под напряжением) алгоритм оценивает текущее положение ротора.
- Алгоритм реализации: Наиболее распространенным является векторное управление (FOC). FOC измеряет фазные токи двигателя и с помощью математических моделей (например, наблюдателя) в реальном времени оценивает угол и скорость ротора, обеспечивая точное управление моментом и скоростью.
- Преимущества:
- Нулевая добавочная инерция: Полностью не влияет на динамические характеристики двигателя.
- Нулевой добавочный объем: Не требует дополнительного аппаратного обеспечения, все вычисления выполняются контроллером.
- Низкая стоимость: Экономит стоимость самого датчика.
- Недостатки:
- Проблема запуска: При остановленном двигателе обратная ЭДС равна нулю, и положение определить невозможно. Требуются специальные алгоритмы запуска (например, “выравнивание и запуск”), чтобы принудительно раскрутить двигатель до определенной скорости before переключения в бездатчиковый режим.
- Низкоскоростные характеристики: На очень низких скоростях сигнал обратной ЭДС очень слаб, его обнаружение затруднено, что может привести к снижению производительности управления или даже потере синхронизации.
- Сложность алгоритма: Предъявляет высокие требования к вычислительной мощности процессора.
- Миниатюрные энкодеры/датчики Холла:
- В少数 случаях, когда предъявляются extremely высокие требования к плавности работы на низких скоростях и пусковому моменту, и можно смириться с небольшой инерционностью и объемом (например, в высокоточных бионических роботах, медицинских хирургических инструментах), используются сверхкомпактные и сверхлегкие оптические или магнитные энкодеры.
- Эти датчики специально разработаны, их инерционность и объем сведены к минимуму, но стоимость очень высока.
Резюме основных различий
| Характеристика | Обычный двигатель с железным ротором | Двигатель с полым ротором |
|---|---|---|
| Ключевое требование | Высокое разрешение, высокая точность обратной связи по абсолютному положению/скорости | Сверхвысокая скорость отклика, оценка положения в реальном времени на высокой частоте |
| Движущий фактор | Точное управление положением, плавность на низких скоростях, высокий пусковой момент | Чрезвычайно высокое ускорение, очень быстрая динамическая响应, плавность на низких скоростях |
| Распространенные методы | Оптический энкодер, магнитный энкодер, Резольвер (旋转变压器) | Бездатчиковые алгоритмы (в основном FOC), миниатюрные энкодеры |
OTV Company может предоставить решения на основе магнитных энкодеров, подходящие для обеих форм двигателей.
Ключевые характеристики микросхемы магнитного энкодера:
- Сверхвысокое разрешение
- Разрешение измерения угла: 0.015°
- Разрешение цифрового выхода: 16 бит
- Превосходная точность и стабильность
- Способен сохранять производительность в широком диапазоне рабочих магнитных полей 15 – 150 мТл
- Высокая устойчивость к помехам от внешних магнитных полей
- Предельно быстрый динамический отклик
- Скорость обновления угла: до 1 МГц
- Задержка响应: всего 3 мкс (на этапе предельного ускорения/замедления)
- Электрические характеристики
- Рабочее напряжение: Поддерживает питание 3.3В и 5В
- Потребляемый ток: 11.6 мА
- Мощная адаптивность к окружающей среде
- Диапазон рабочих температур: -40°C до +125°C
- Высокая интеграция и совместимость
- Сверхкомпактный корпус QFN33, может быть интегрирован в微型 двигатели с полым ротором диаметром Φ<13mm
- Поддерживает различные способы монтажа
- Гибкий интерфейс вывода
- Предоставляет ABZ, UVW, SPI, PWM и другие варианты интерфейсов вывода для адаптации к различным сценариям применения.
- Совместимые магнитные кольца
- Мы предоставляем совместимые многополюсные магнитные кольца с высокой точностью и стабильностью, которые могут further улучшить и обеспечить точность измерений системы.