Что такое магнитное кольцо энкодера?
Энкодер — это сенсорная система, преобразующая механическое перемещение (угол/положение/скорость) в электрические сигналы. Он широко применяется в промышленной автоматизации, робототехнике, управлении двигателями и медицинских устройствах.
Энкодеры можно классифицировать по принципу работы:
| Тип энкодера | Принцип работы | Ключевые характеристики |
|---|---|---|
| Оптический энкодер | Использует растр и фотоэлектрический датчик для регистрации изменения светового сигнала | Высокое разрешение, высокая точность, чувствительность к загрязнениям |
| Магнитный энкодер | Использует изменение магнитного поля магнитного кольца, регистрируемого магнитным датчиком | Устойчивость к загрязнениям, бесконтактный принцип работы, высокая надёжность |
| Индуктивный энкодер | Определяет изменение положения на основе электромагнитной индукции | Высокая помехоустойчивость, не требует магнитных материалов |
Вам стоит рассмотреть магнитный энкодер в следующих сценариях:
| Сценарий применения | Условия / Требования системы | Почему подходит магнитный энкодер | Типичное применение в отраслях |
|---|---|---|---|
| Сложные условия среды | Пыль, масло, влага, конденсат | Отсутствие оптического пути, устойчив к загрязнению | Промышленная автоматизация, тяжёлая техника |
| Ограниченное пространство | Ограниченное осевое или радиальное пространство | Компактная кольцевая структура, простая интеграция | Компактные двигатели, сочленения роботов |
| Высокие требования к надёжности | Длительная непрерывная работа, сложное обслуживание | Бесконтактный принцип, отсутствие износа, долгий срок службы | Промышленное оборудование, AGV/AMR |
| Большие механические допуски | Эксцентриситет, биение, погрешности установки | Высокая устойчивость к механическим погрешностям | Серийное оборудование, сложные сборки |
| Необходимость кастомизации | Нестандартная конструкция, специальное число полюсов | Кольцо и намагничивание могут быть изготовлены на заказ | Специальные двигатели, приводы особого типа |
| Высокие требования к стабильности | Массовое производство, стабильный выходной сигнал | Контролируемое магнитное поле, хорошая повторяемость | Промышленные роботы, автоматизированные линии |
Магнитный энкодер обычно состоит из: печатной платы (ПП) с микросхемой магнитного энкодера в основе + магнитного кольца энкодера + механического корпуса.
Магнитные микросхемы энкодера можно классифицировать по принципу работы: Холл, AMR, TMR и другие.
Само магнитное кольцо энкодера может быть изготовлено из различных материалов:
| Материал кольца | Английское название | Состав материала | Ключевые характеристики | Напряжённость поля |
|---|---|---|---|---|
| Кольцо из бондированного магнита | Bonded / Plastic Magnet | Магнитный порошок (Феррит / РЗМ) + полимерная матрица | Высокая структурная сложность, хорошая стабильность | Средняя |
| Кольцо из резинового магнита | Rubber Magnet | Магнитная резина (NBR) + металлическое опорное кольцо | Гибкое, высокая монтажная допускная способность | Низкая |
| Кольцо из спечённого NdFeB | Sintered NdFeB Ring | Спечённый редкоземельный материал NdFeB | Высокий энергетический продукт, сильное магнитное поле | Высокая |
| Кольцо из ферритового магнита | Ferrite Magnet Ring | Ферритовый материал | Устойчивость к температуре и коррозии | Средняя |
Типовая структура резиновой магнитной мишени:

2.Зачем нужна индивидуальная магнитная мишень?
В промышленных и робототехнических применениях производительность системы магнитного энкодера — её точность, повторяемость и другие параметры — определяется совокупным взаимодействием магнитной микросхемы энкодера, магнитной мишени и механической установки.
Если какой-либо из этих элементов изменяется (микросхема, способ крепления или пространственные ограничения), стандартное кольцо часто не сможет удовлетворить требованиям вашего конкретного применения.
Типичные ограничения в реальных промышленных и робототехнических применениях включают:
Ограниченное монтажное пространство
Необходимость добавления реперной метки
Допуски на соосность и биение
Высокоскоростная работа или работа в условиях сильной вибрации
Специальные способы монтажа/крепления
Путём кастомизации размеров, допусков, монтажных особенностей и структуры намагничивания мишени вы можете обеспечить полное соответствие всей системы магнитного энкодера вашим конкретным требованиям. Это повышает общую точность и надёжность системы.
3. Многополюсные магнитные мишени энкодера
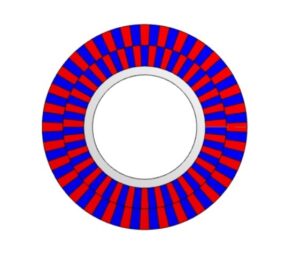
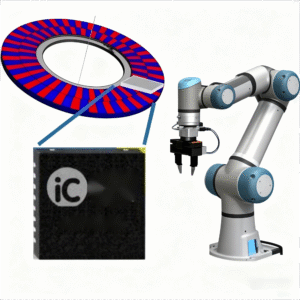
Многополюсная магнитная мишень намагничивается по окружности с чередующимися полюсами N/S. Увеличение количества полюсов повышает пространственное разрешение магнитного поля, что существенно увеличивает разрешающую способность сенсорной системы.
Такие мишени идеально подходят для промышленных сервосистем и шарниров роботов, требующих непрерывной высокоточной обратной связи по углу поворота. Параметры, такие как количество пар полюсов, могут быть настроены в соответствии с возможностями вашей микросхемы и требованиями системы для достижения оптимального баланса между разрешением, стабильностью сигнала и стоимостью.
Многополюсные мишени можно классифицировать по типам намагниченных дорожек:
Однодорожковая многополюсная мишень
Однодорожковая многополюсная мишень с реперной меткой — обеспечивает абсолютное позиционирование в пределах одного оборота благодаря специальной эталонной точке.
Двухдорожковая многополюсная мишень — позволяет получать уникальное абсолютное положение за счёт верньерного расчёта сигналов с двух дорожек.
3.1 Кольцо энкодера с радиальной намагниченностью
Радиальная намагниченность означает, что магнитное поле ориентировано вдоль радиального направления. Это один из наиболее распространённых методов намагничивания для энкодерных систем, устанавливаемых на валы. Такая конфигурация создаёт стабильное симметричное поле на внешнем или внутреннем диаметре кольца, что делает её идеально подходящей для использования с окружающими магнитными сенсорными микросхемами.
В промышленных двигателях и шарнирах роботов радиально намагниченные кольца эффективно снижают чувствительность к изменениям воздушного зазора, повышая общую надёжность системы.
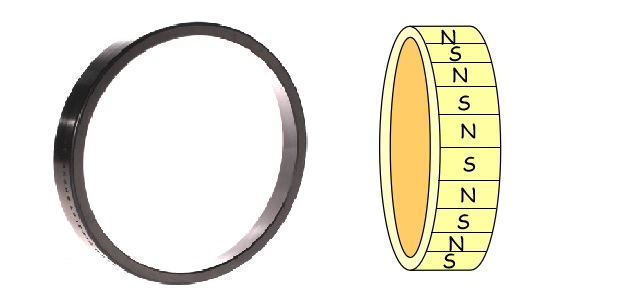
3.2 Кольцо энкодера с осевой намагниченностью
При осевой намагниченности магнитное поле ориентировано вдоль оси. Этот тип обычно используется в конструкциях с ограниченным пространством или в системах с торцевой схемой детектирования. По сравнению с радиальной намагниченностью, осевая намагниченность лучше подходит для компактных компоновок.
В концевых устройствах роботов, компактных сервомодулях или интегрированных энкодерах осевые намагниченные кольца обеспечивают надёжное определение угла в ограниченном осевом пространстве.
Мы предлагаем стандартные магнитные кольца, совместимые с микросхемами серии IC-Haus MU, такими как MU, MU150 и MU200. Кроме того, мы можем изготовить магнитные кольца по индивидуальным требованиям заказчиков для соответствия характеристикам используемых микросхем.
3.3 Линейная намагниченная мишень энкодера
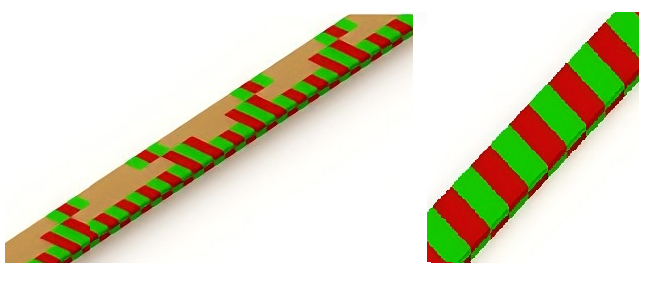
Для достижения высокоточного измерения линейного перемещения в магнитных энкодерах используются специализированные линейные магнитные линейки, формирующие замкнутую измерительную систему.
В зависимости от конкретных требований к измерениям, линейные магнитные линейки можно классифицировать на два основных типа по конструкции намагничивания:
Однодорожковые линейные магнитные линейки
Двухдорожковые линейные магнитные линейки
Распространённые шаги намагничивания включают: 1 мм, 2 мм или 5 мм.
4. Технологический процесс изготовления резиновых магнитных колец
Стандартные резиновые магнитные мишени изготавливаются путём соединения металлического опорного кольца с резиной, смешанной с ферритовым порошком. Собранное изделие затем намагничивается с помощью высоковольтного импульсного оборудования, формируя мишень с регулярной структурой магнитных полюсов.
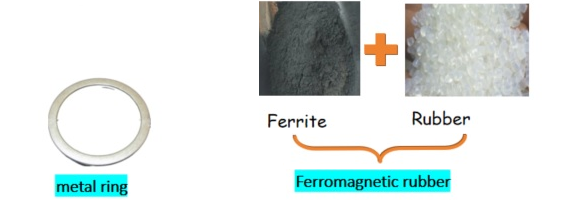
Ферромагнитная резина представляет собой композитный материал, получаемый путем смешивания ферритового порошка с невулканизированной резиной (например, нитрильной) и последующего отверждения в процессе вулканизации. Основные технические трудности заключаются в обеспечении равномерного распределения порошка в резиновой матрице и поддержании высокой степени наполнения ферритовым порошком.

Намагничивание является ещё одним критически важным процессом при производстве магнитных колец, в котором используются высоковольтные импульсы для создания мгновенного сильного магнитного поля с целью мгновенной намагниченности ферритовых частиц в резине.
Точность намагничивания коллективно определяется такими факторами, как:
однородность резиновой смеси,
точность намагничивающей оснастки,
соосность механизма вращения при намагничивании.
100% продукции должно проходить контроль точности перед отгрузкой заказчику.
5. Типичные применения в промышленных сенсорных системах
- Промышленные серводвигатели
- Шарниры и приводы роботов
- Обратная связь по положению в автоматизированном оборудовании
- Прецизионные системы вращательного управления


6. Мы работаем над созданием вашей индивидуальной магнитной мишени для энкодера
Мы можем адаптировать следующие ключевые параметры в соответствии с вашей конкретной микросхемой магнитного энкодера и механической установкой:
Количество полюсов и ширина полюсного деления
Направление намагничивания (радиальное / осевое)
Специальные схемы намагничивания
Специальные реперные метки (например, пропуск полюса)
Напряжённость магнитного поля
Размеры и допуски кольца энкодера (например, для некоторых применений требуется толщина 1 мм)
Если вы разрабатываете промышленную или робототехническую систему энкодерного считывания, мы готовы обсудить с вами требования к магнитному кольцу энкодера. Наша инженерная команда готова совместно с вами подобрать оптимальную схему намагничивания и механическую конструкцию.
FAQ
1.В каких случаях стоит выбрать магнитный энкодер?
Рассмотрите магнитный энкодер, если ваше применение связано с пылью, маслом, влагой или конденсацией, либо если у вас есть строгие требования к монтажному пространству, механическим допускам или долгосрочной эксплуатационной надёжности. Он особенно хорошо подходит для промышленной автоматизации, робототехники и тяжёлого машиностроения, где ключевыми факторами являются компактность и долговечность.
2.Зачем может потребоваться индивидуальное магнитное кольцо энкодера вместо стандартного?
Потому что производительность системы энкодера зависит от совокупного воздействия кольца, сенсорной микросхемы и механического корпуса. Когда монтажное пространство, механические допуски, скорость или требуемые функции (например, реперная метка) выходят за рамки стандартных продуктов, индивидуальное кольцо позволяет оптимизировать размеры, намагничивание и крепление для обеспечения максимальной точности, стабильности и надёжности системы.
3.Какие ключевые параметры обычно можно настроить при кастомизации магнитного кольца энкодера?
Ключевые настраиваемые параметры включают:
Количество пар полюсов и шаг намагничивания
Направление намагничивания (радиальное/осевое)
Напряжённость магнитного поля
Точные размеры кольца и допуски (внутренний/внешний диаметр, толщина)
Механические монтажные интерфейсы (отверстия, пазы, фланцы)
Специальные функции, такие как форма и расположение реперной метки (например, пропуск полюса)
Эти параметры должны быть согласованы с характеристиками вашего датчика и механической конструкцией системы.
4.Каков типичный срок разработки и производства индивидуального магнитного кольца энкодера?
Процесс обычно состоит из двух этапов. Во-первых, разработка образца (проектирование, изготовление оснастки, создание прототипа) обычно занимает от 4 до 8 недель. Во-вторых, после утверждения образца серийное производство и поставка для стандартного заказа занимает около от 3 до 6 недель. Общий срок зависит от сложности конструкции, процесса намагничивания и объема заказа.